
Now that we are familiar with epipolar geometry, let's see how to use it to build a 3D map based on stereo images. Let's consider the following figure:

The first step is to extract the disparity map between the two images. If you look at the figure, as we go closer to the object from the cameras along the connecting lines, the distance decreases between the points. Using this information, we can infer the distance of each point from the camera. This is called a depth map. Once we find the matching points between the two images, we can find the disparity by using epipolar lines to impose epipolar constraints.
Let's consider the following image:

If we capture the same scene from a different position, we get the following image:

If we reconstruct the 3D map, it will look like this:
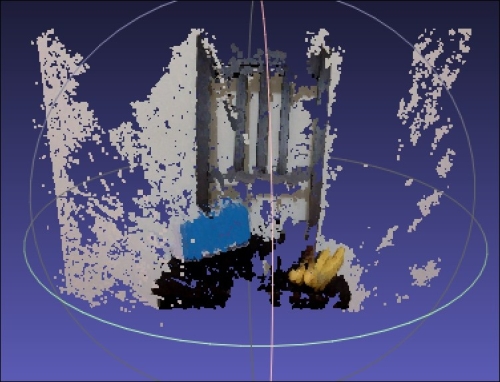
Bear in mind that these images were not captured using perfectly aligned stereo cameras. That's the reason the 3D map looks so noisy! This is just to demonstrate how we can reconstruct the real world...