
So far we've learned how to use the Step source block. This is arguably the most important source because it presents clearly the system's transient answer to a stimulus.
But that's about it; it doesn't show the response to a wave, a random signal, or a noise.
A more thorough test with other sources could help us detect problems that were overlooked. For instance, we didn't take into account while testing that the car can show a very different response in lower gears: at 100 km/h, it was running in fourth gear.
The cruise controller is acting only on the throttle, so we can predict that it will be hard for it to follow decreasing speeds.
Let's try using a Sine Wave block as the target speed source, which was configured as follows:
Bias:
100(km/h)Amplitude:
20(km/h)Frequency:
0.2(rad/s)
The simulation result is shown as follows:
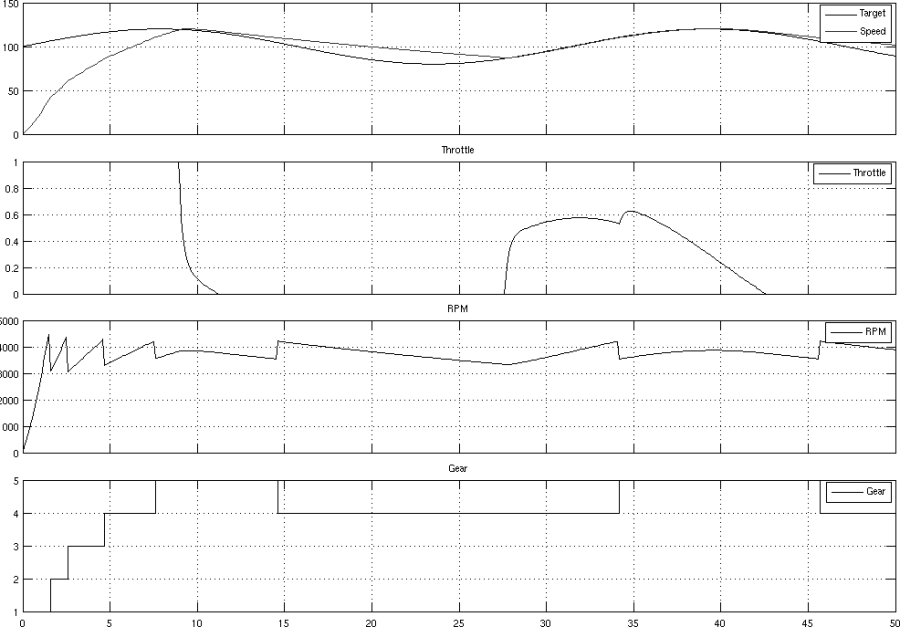
Our cruise controller can't use the brakes, so it isn't able to follow the falling side of the wave. But it's able to rise up fast...