



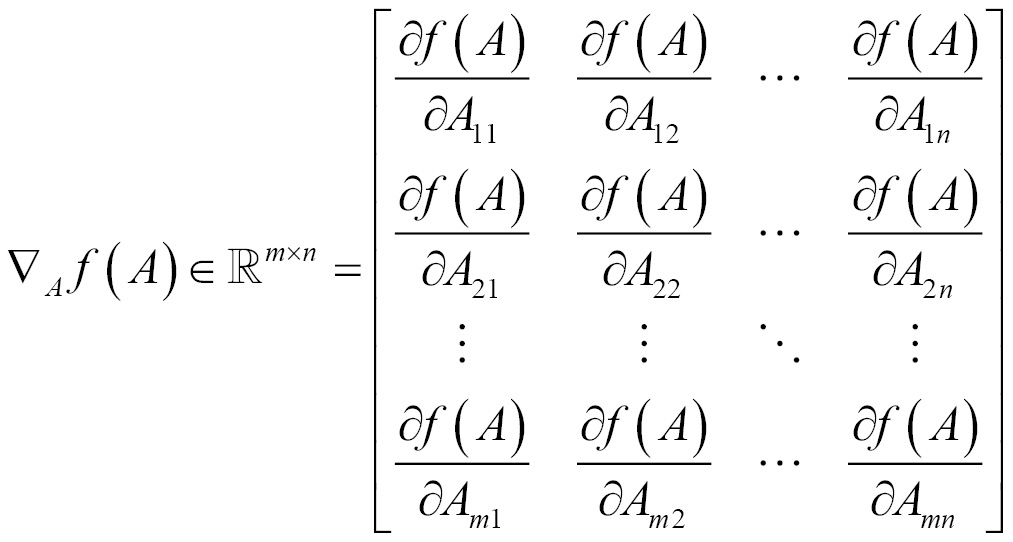
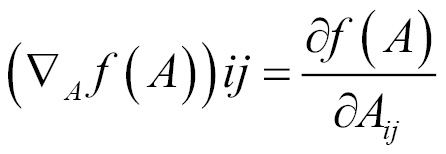
Topics in the previous sections are covered as part of standard linear algebra; something that wasn't covered is basic calculus. Despite the fact that the calculus that we use is relatively simple, the mathematical form of it may look very complex. In this section, we present some basic forms of matrix calculus with a few examples.
-
Book Overview & Buying
-
Table Of Contents

Neural Network Programming with TensorFlow
By :
Neural Network Programming with TensorFlow
By:
Overview of this book
If you're aware of the buzz surrounding the terms such as "machine learning," "artificial intelligence," or "deep learning," you might know what neural networks are. Ever wondered how they help in solving complex computational problem efficiently, or how to train efficient neural networks? This book will teach you just that.
You will start by getting a quick overview of the popular TensorFlow library and how it is used to train different neural networks. You will get a thorough understanding of the fundamentals and basic math for neural networks and why TensorFlow is a popular choice Then, you will proceed to implement a simple feed forward neural network. Next you will master optimization techniques and algorithms for neural networks using TensorFlow. Further, you will learn to implement some more complex types of neural networks such as convolutional neural networks, recurrent neural networks, and Deep Belief Networks. In the course of the book, you will be working on real-world datasets to get a hands-on understanding of neural network programming. You will also get to train generative models and will learn the applications of autoencoders.
By the end of this book, you will have a fair understanding of how you can leverage the power of TensorFlow to train neural networks of varying complexities, without any hassle. While you are learning about various neural network implementations you will learn the underlying mathematics and linear algebra and how they map to the appropriate TensorFlow constructs.
Table of Contents (11 chapters)
Preface
 Free Chapter
Free Chapter
Maths for Neural Networks
Deep Feedforward Networks
Optimization for Neural Networks
Convolutional Neural Networks
Recurrent Neural Networks
Generative Models
Deep Belief Networking
Autoencoders
Research in Neural Networks
Getting started with TensorFlow



 .
.








