
In Chapter 3, Preparing Your Drone for Flying, we have built a DIY drone using ArduPilot. We will first set up our existing drone for doing surveys. We do not need to change any kind of hardware in that system:
- Open the Mission Planner software and go to the Config/Tuning page of Mission Planner and select Planner. You will see the following page:

- Now, choose a suitable unit for the distance and the speed of the copter, because these are vitally important to send a drone somewhere precisely.
- From the top-left corner of the Mission Planner, select Flight Plan, and you will see the following screen:
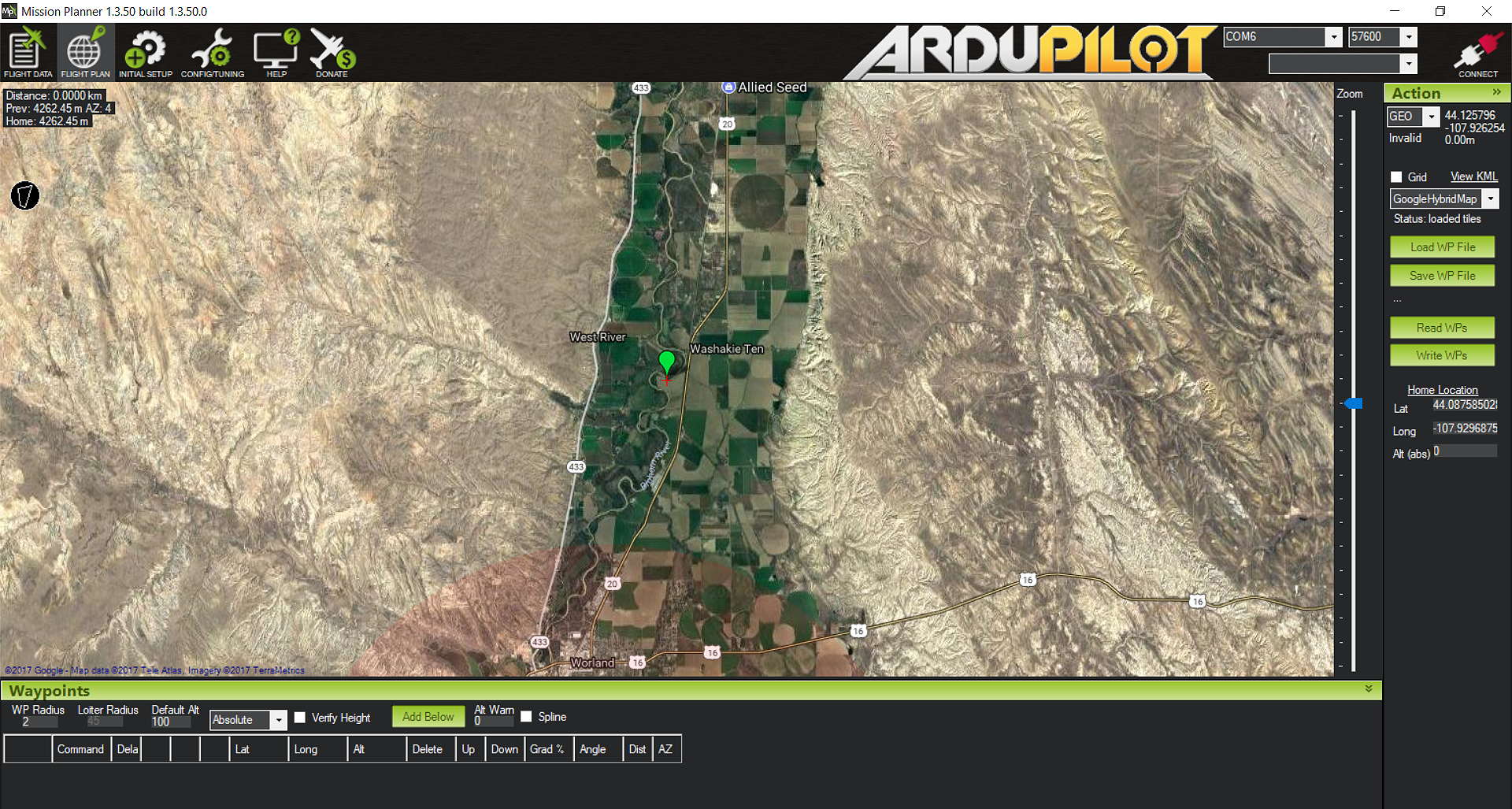
This is just a map, and you can see a green pointer which says Home/H when the mouse is hovered over it. We can click and move the pointer anywhere we want.
- We first place the pointer from where we will depart the drone to our destination:
Remember...