
Now that you've checked the servo motor controller and the servos, you'll need to connect the servo controller up to the Raspberry Pi and make sure you can control the servos from it. Remove the USB cable from the PC and connect it to the Raspberry Pi.
Let's now focus on the motor controller by downloading the Linux code from Pololu at www.pololu.com/docs/0J40/3.b. Here are the steps to do so:
First, log on to your Raspberry Pi by putty, then type
wget.http://www.pololu.com/file/download/maestro-linux-100507.tar.gz?file_id=0J315.Move the file using
mv maestro-linux-100507.tar.gz\?file_id\=0J315 maestro-linux-100507.tar.gz.Unpack the file by typing
tar -xzfv maestro-linux-100507.tar.gz. This will create a directory calledmaestro_linux.Go to that directory by typing
cd maestro_linuxand thenls -l; you should see something like this:
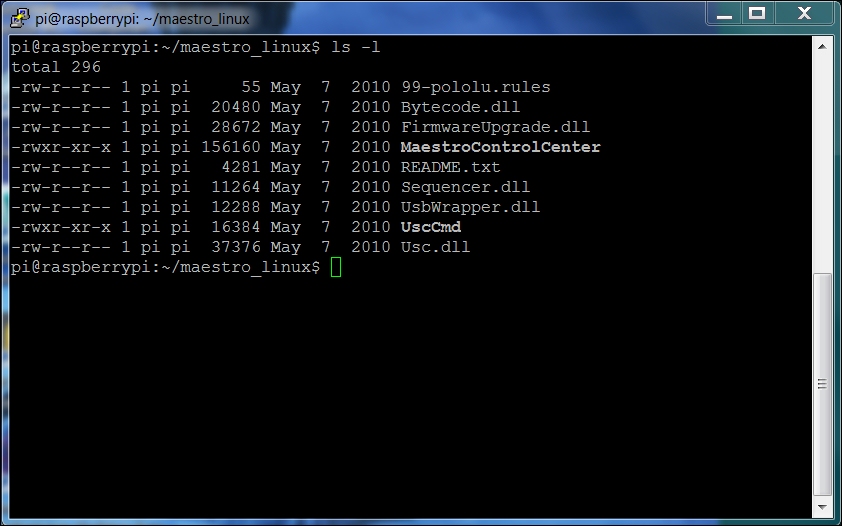
The README.txt file will give you explicit instructions on how to install the software. This is basically...