

The procedure for creating the MoveIt! interface for industrial robots is the same as the other ordinary robot manipulators, except in some standard conventions. The following procedure gives a clear idea about these standard conventions:
- Launch the MoveIt! setup assistant by using the following command:
$ roslaunch moveit_setup_assistant setup_assistant.launch- Load the URDF from the robot description folder or convert xacro to the URDF and load to the setup assistant.
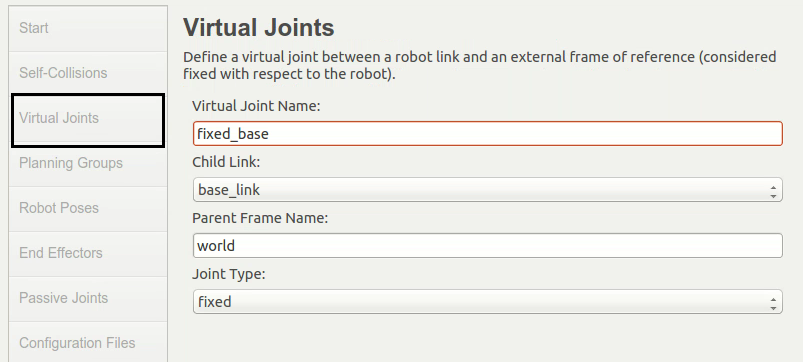
Figure 3: Adding MoveIt! - virtual joints
- In the next step, we are adding
Planning Groups for manipulator and End Effector.Here, also, the group names are arbitrary. The default plugin is KDL; we can change it even after...