
Flick HAT comes in the form of a shield, which you can simply plug into your Raspberry Pi and start using. However, once you do that, you will not be left with any GPIO pins. Hence, to save ourselves from that problem, we will be connecting it using male-to-female wires. This will give us access to the other GPIO pins and then we can have fun.
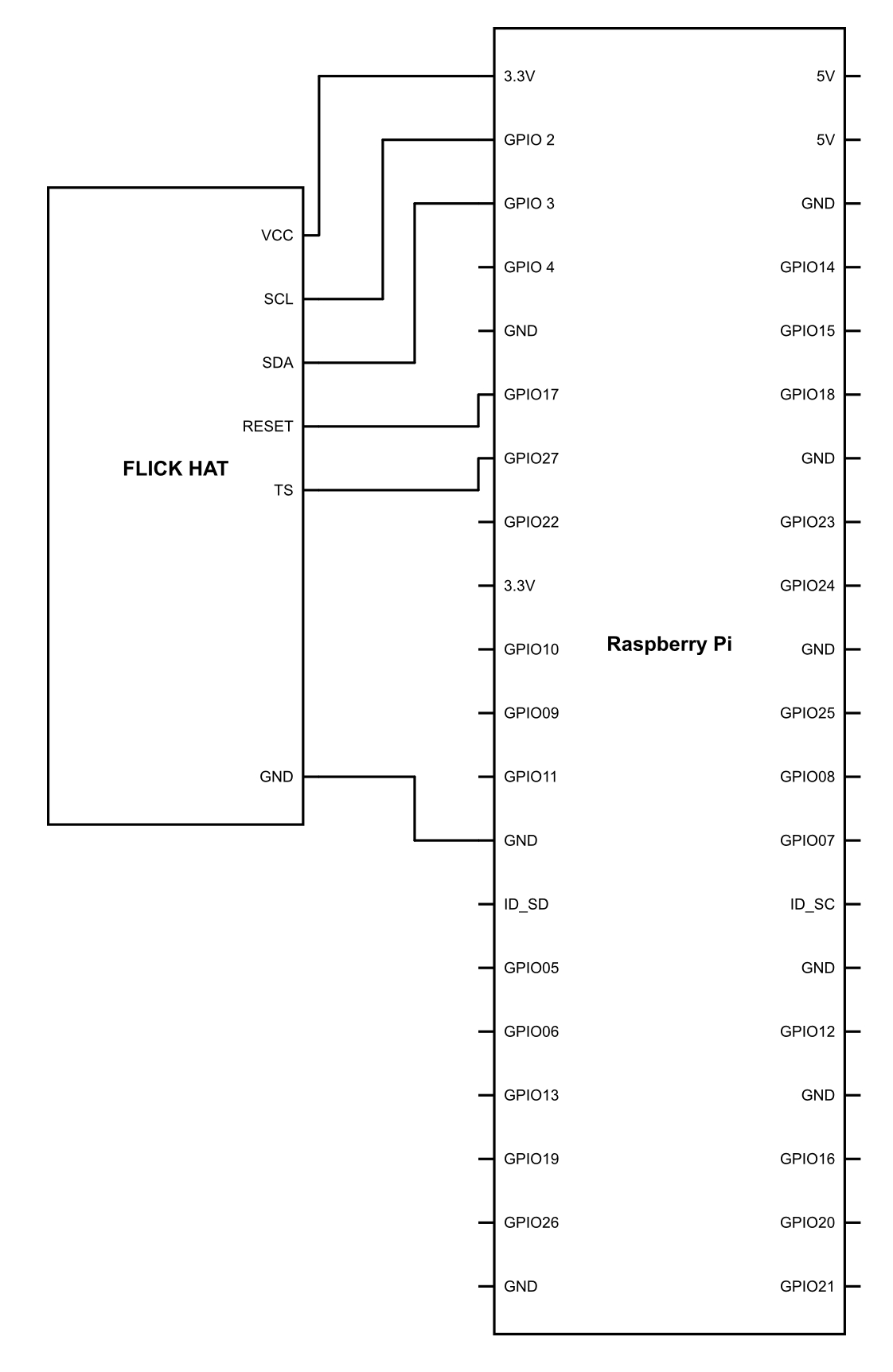
So, go ahead and connect it as follows. The following is a pin diagram of the Flick board:

Thereafter, make the connections as follows:
Once the connection is done, simply upload this code and see what happens:
import signal
import flicklib
import time
def message(value):
print value
@flicklib.move()
def move(x, y, z):
global xyztxt
xyztxt = '{:5.3f} {:5.3f} {:5.3f}'.format(x,y,z)
@flicklib.flick()
def flick(start,finish):
global flicktxt
flicktxt = 'FLICK-' + start[0].upper() + finish[0].upper()
message(flicktxt)
def main():
global xyztxt
global flicktxt
xyztxt = ''
flicktxt = ''
flickcount = 0
...