ROS is an open source, flexible software framework for programming robots. ROS provides a hardware abstraction layer in which developers can build robotics applications without worrying about the underlying hardware. ROS also provides different software tools to visualize and debug robot data. The core of the ROS framework is a message-passing middleware in which processes can communicate and exchange data with each other, even when they're running from different machines. ROS message passing can be synchronous or asynchronous.
Software in ROS is organized as packages, and it offers good modularity and reusability. Using the ROS message-passing middleware and hardware abstraction layer, developers can create tons of robotic capabilities, such as mapping and navigation (in mobile robots). Almost all the capabilities in ROS will be robot agnostic so that all kinds of robots can use it. New robots can directly use this capability package without modifying any code inside the package.
ROS has widespread collaborations in universities, and lots of developers contribute to it. We can say that ROS is a community-driven project supported by developers worldwide. This active developer ecosystem distinguishes ROS from other robotic frameworks.
In short, ROS is the combination of Plumbing (or communication), Tools, Capabilities, and Ecosystem. These capabilities are demonstrated in the following diagram:

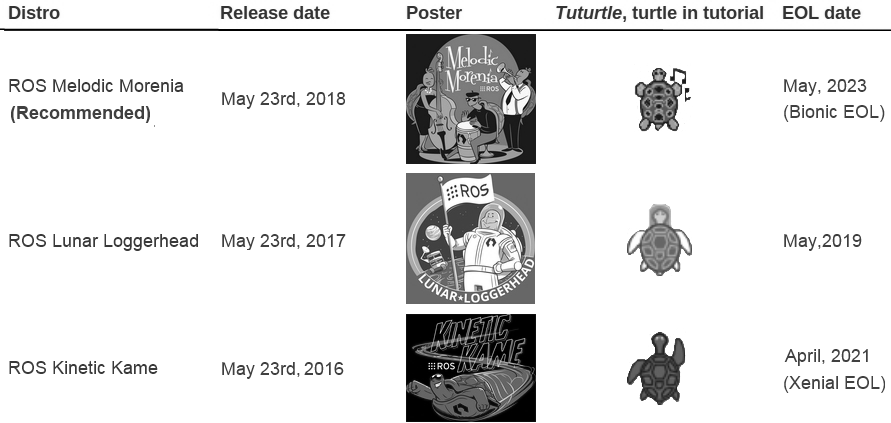
The ROS project was started in 2007 at Stanford University under the name Switchyard. Later on, in 2008, the development was undertaken by a robotic research startup called Willow Garage. The major development in ROS happened in Willow Garage. In 2013, the Willow Garage researchers formed the Open Source Robotics Foundation (OSRF). ROS is actively maintained by OSRF now. Now, let's look at a few ROS distributions.
OSRF: http://www.osrfoundation.org/.