-
Book Overview & Buying
-
Table Of Contents

Essential Mathematics for Quantum Computing
By :
Essential Mathematics for Quantum Computing
By:
Overview of this book
Quantum computing is an exciting subject that offers hope to solve the world’s most complex problems at a quicker pace. It is being used quite widely in different spheres of technology, including cybersecurity, finance, and many more, but its concepts, such as superposition, are often misunderstood because engineers may not know the math to understand them. This book will teach the requisite math concepts in an intuitive way and connect them to principles in quantum computing.
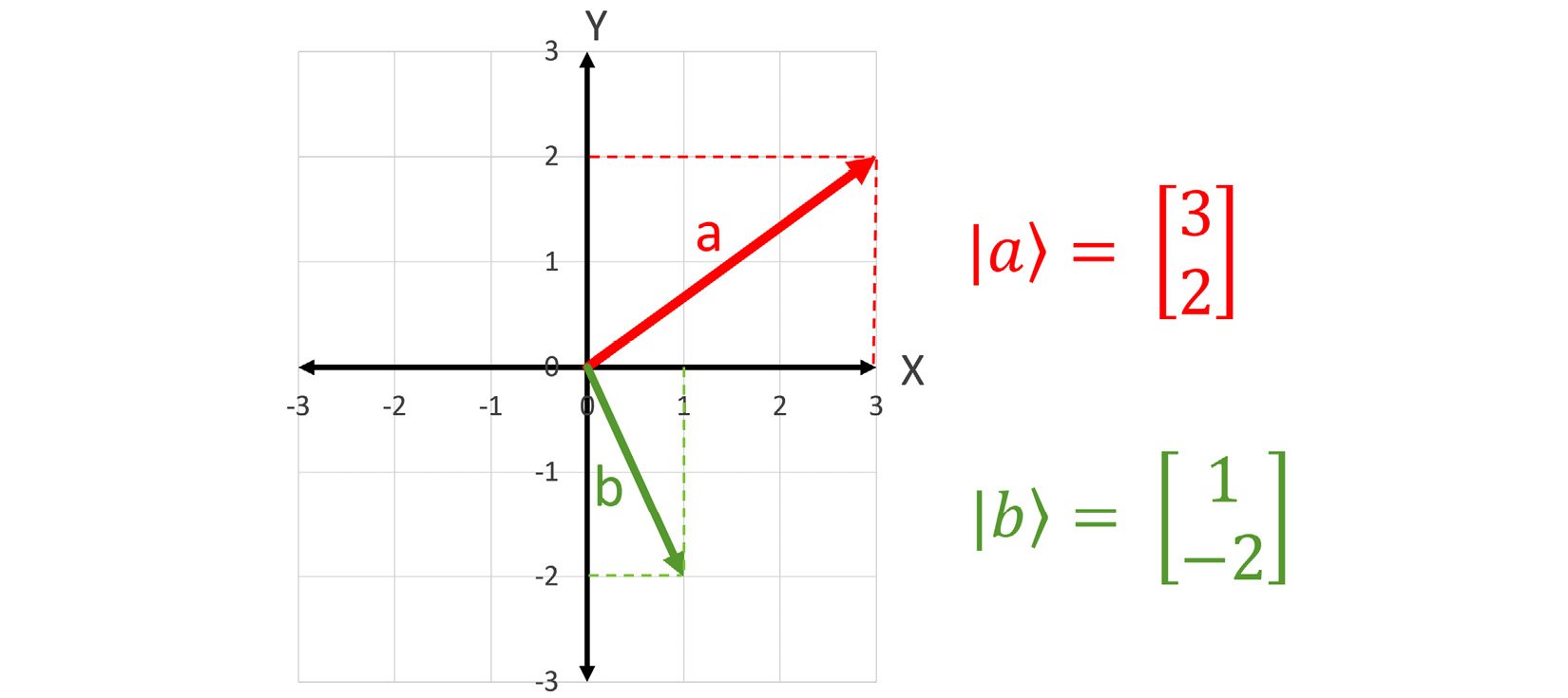
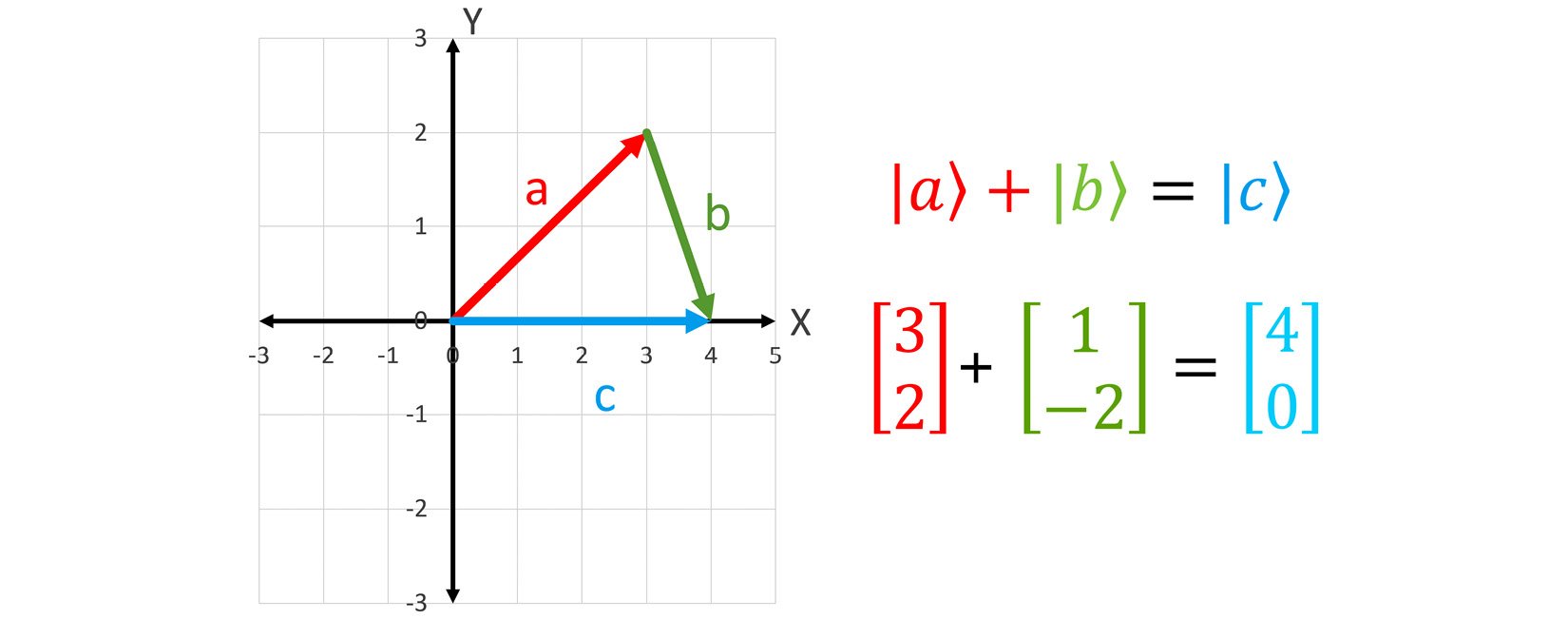
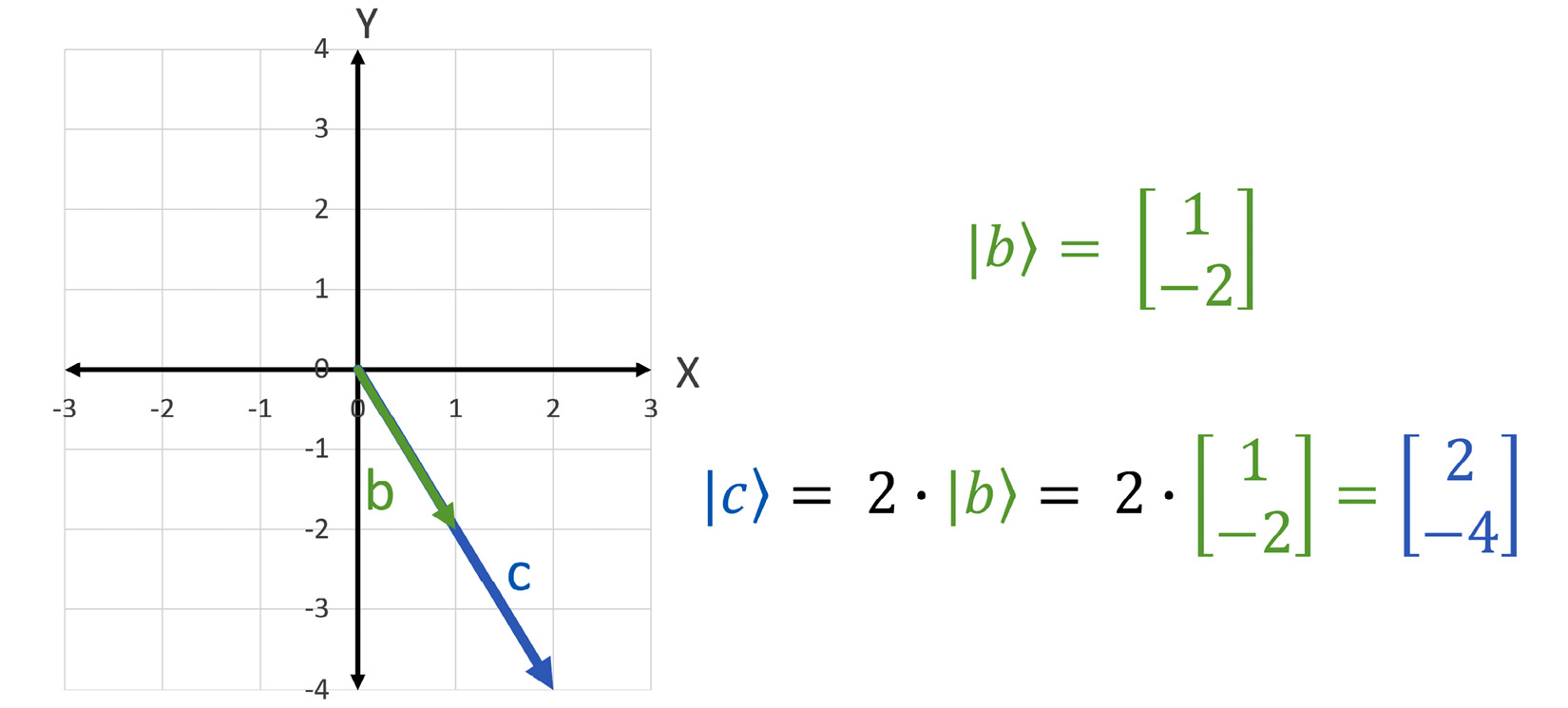
Starting with the most basic of concepts, 2D vectors that are just line segments in space, you'll move on to tackle matrix multiplication using an instinctive method. Linearity is the major theme throughout the book and since quantum mechanics is a linear theory, you'll see how they go hand in hand. As you advance, you'll understand intrinsically what a vector is and how to transform vectors with matrices and operators. You'll also see how complex numbers make their voices heard and understand the probability behind it all.
It’s all here, in writing you can understand. This is not a stuffy math book with definitions, axioms, theorems, and so on. This book meets you where you’re at and guides you to where you need to be for quantum computing. Already know some of this stuff? No problem! The book is componentized, so you can learn just the parts you want. And with tons of exercises and their answers, you'll get all the practice you need.
Table of Contents (20 chapters)
Preface

Section 1: Introduction
 Free Chapter
Free Chapter
Chapter 1: Superposition with Euclid
Chapter 2: The Matrix
Section 2: Elementary Linear Algebra
Chapter 3: Foundations
Chapter 4: Vector Spaces
Chapter 5: Using Matrices to Transform Space
Section 3: Adding Complexity
Chapter 6: Complex Numbers
Chapter 7: EigenStuff
Chapter 8: Our Space in the Universe
Chapter 9: Advanced Concepts
Section 4: Appendices
Other Books You May Enjoy
Appendix 1: Bra–ket Notation
Appendix 2: Sigma Notation
Appendix 3: Trigonometry
Appendix 4: Probability
Appendix 5: References