
Let's start with the mathematical definition of convolution for discrete functions (since in digital image processing all functions are discrete). To form our problem in a signal processing sense, we can define it as passing an input image I, through a Linear Space Invariant (LSI) system, performing convolution with a kernel h (also called a filter), to produce an output image, g. Hence, we get the following block diagram:
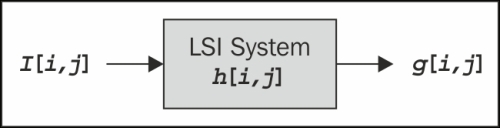
This process is described mathematically by the following equation:

where * is the symbol for convolution and the large Σ denotes a sum. The reason we have two sums is because our process is two-dimensional. Without going into too much detail, we can summarize the process described previously using the following steps, which are also followed in the implementation of conv2:
Rotate the convolution kernel by 180 degrees to abide by the process in the double sum of the equation.
Determine the central pixel of the neighborhood. This is straightforward...