

Each ESC must be connected to a motor, the flight controller, and the PDB. Connect the three wires of each ESC to the three wires of each motor randomly. You might have connected them wrong, but it's ok. We will test this later and fix it if needed.

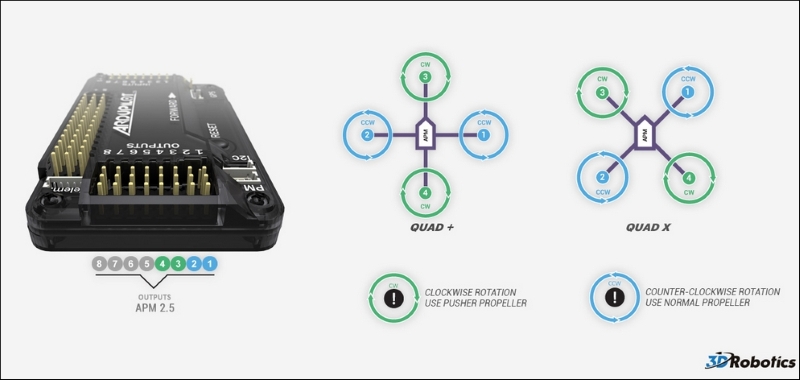
Depending on the flight controller you have, you must connect the four servo wires in the right position. The flight controller that we will use is APM v2.8 and you can find the following figure on the official website of ArduPilot.
Lastly, the power distribution board, or PDB, must have four female T connectors and one male. Plug in the four female connectors to each ESC and leave the male for the battery. The battery is the last component that should be connected.
