

ROS creates a network where all the processes are connected. Any node in the system can access this network, interact with other nodes, see the information that they are sending, and transmit data to the network.
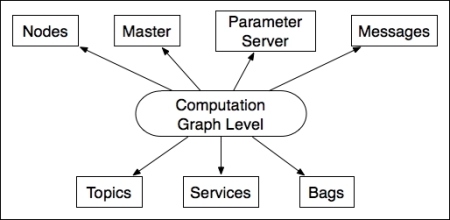
The basic concepts in this level are nodes, the Master, the Parameter Server, messages, services, topics, and bags, all of which provide data to the graph in different ways:
Nodes: Nodes are processes where computation is done. If you want to have a process that can interact with other nodes, you need to create a node with this process to connect it to the ROS network. Usually, a system will have many nodes to control different functions. You will see that it is better to have many nodes that provide only a single functionality, rather than a large node that makes everything in the system. Nodes are written with an ROS client library, for example,
roscpporrospy.Master: The Master provides name registration and lookup for the rest of...