
There are two pieces of (free) software that you'll want. The first is your primary Pixhawk software (Mission Planner). The other is QgroundControl. Both are available from multiple sources, and a simple Google search will get you both.
Although we have the radio telemetry unit installed, on our very first startup of Pixhawk we're going to need to directly connect it to a computer via USB. Remember that plug on the side of the Pixhawk cube? That's our computer USB plug. It's best to use a laptop (so you can use it in the field).
After connecting the Pixhawk to our computer, start up the Mission Planner software. You'll be confronted with this requestor:
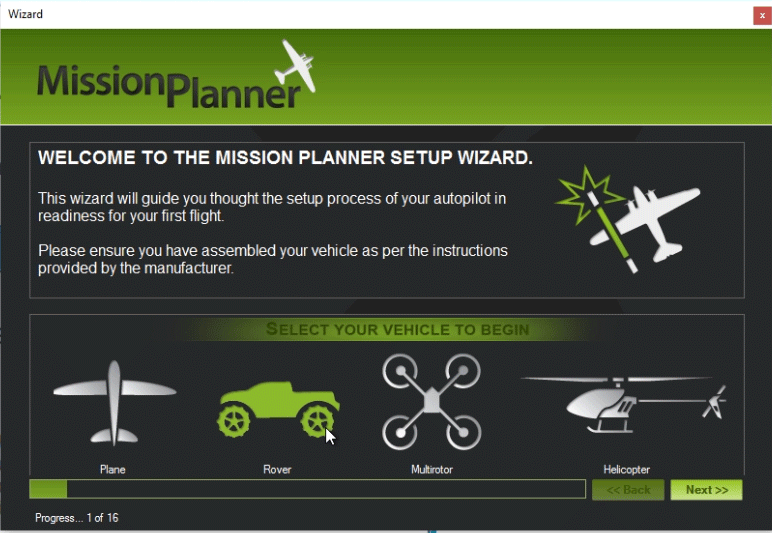
Obviously, you'll want to select Rover. This wizard will do the initial setup of your Pixhawk and calibrate it for use.
Next you simply select how the computer connects to the Pixhawk (as shown in the following screenshot):
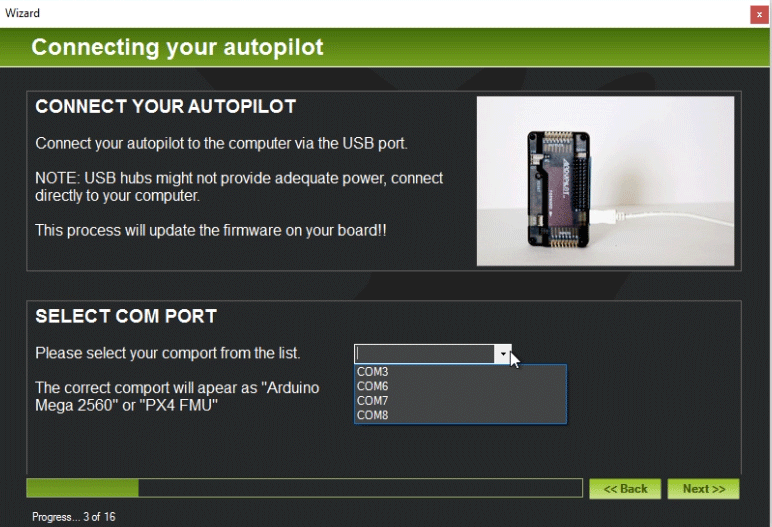
At this point, you must provide which port the Pixhawk is attached...