
You've checked the servo motor controller and the servos; you'll now connect the motor controller to the Raspberry Pi Zero and make sure that you can control the servos from it. Remove the USB cable from the PC and connect it to the Raspberry Pi Zero. The entire system will look similar to the following image:
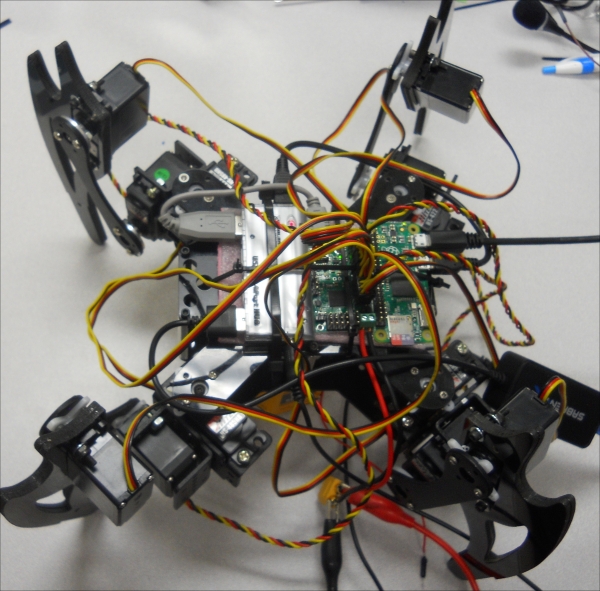
The Raspberry Pi Zero is in the middle, the motor controller is to the right, and the powered hub to the left. The alligator clips below are connected to a power supply; eventually you'll want to connect these to a battery.
Let's now talk to the motor controller by downloading the Linux code from Pololu at www.pololu.com/docs/0J40/3.b:
Perhaps the best way is to log on to your Raspberry Pi Zero through PuTTY, then type
wget http://www.pololu.com/file/download/maestro-linux-100507.tar.gz?file_id=0J315.Then, move the file using
mv maestro-linux-100507.tar.gz\?file_id\=0J315 maestro-linux-100507.tar.gz.Unpack the file by typing
tar...